此章節內容包含連接到 KINGSTAR 前所需的基本 EtherCAT 設定與系統設定。
於啟動頁面點擊「新增專案」後,即開啟「連線設定」頁面。
連線 / 斷線:點擊「連線」可將硬體連接到 KINGSTAR 子系統,連線建立後,此按鈕將會變為「斷線」。
注意:只要設定工具未關閉,就算將子系統與硬體斷線,所有設定仍會保留。

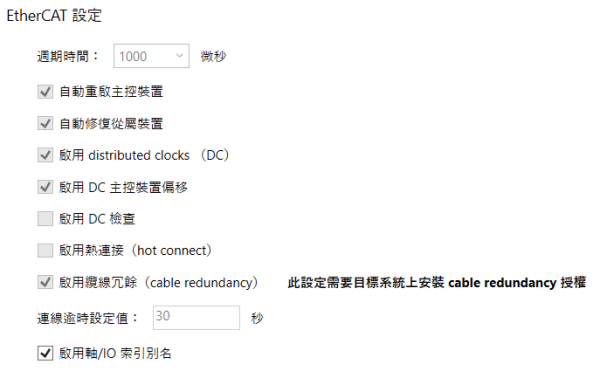
EtherCAT 設定
週期時間:EtherCAT 網路的週期時間,點擊下拉選單以選擇週期時間,或直接於輸入框輸入一個值。KINGSTAR 總線 Runtime 套裝所支援的最快週期為 1 毫秒(1000 微秒),若需要更快的週期時間,請先取得高速計時器套件。請注意:
自動重啟主控裝置:若纜線斷開,EtherCAT 主站將在纜線接上時自動重啟。 自動修復從屬裝置:若任一從站消失(因替換伺服驅動器、纜線斷開、斷電或其他原因)或進入 EtherCAT 錯誤狀態,其將自動重啟,而非處於錯誤狀態的從站將不受影響並繼續正常運作。 啟用 distributed clocks (DC):啟用或停用分散式時鐘同步。 啟用 DC 主控裝置偏移:決定用來同步在 EtherCAT 網路上的裝置之參考時鐘,有兩種模式:主控裝置偏移 (Master Shift) 與總線偏移 (Bus Shift),若勾選,將使用主控裝置偏移。
啟用 DC 檢查:在 KINGSTAR 子系統啟動期間啟用分散式時鐘 (DC) 檢查。 啟用熱連接 (hot connect):在 KINGSTAR 子系統運作時將新硬體新增至 EtherCAT 網路。 啟用線纜冗餘 (cable redundancy):啟用線纜冗餘 EtherCAT 的最後一個從站連接到電腦上的另一個網路卡,如此所有的從站在一條纜線故障時仍可通訊。 連接逾時設定值:分配給硬體連接到 KINGSTAR 子系統的時間,若未在給定的時間內建立連接,將出現錯誤訊息,某些硬體可能需要大於 30 秒的連接時間。 啟用軸 I/O 索引別名:此選項僅在「選項」中勾選「支援索引別名」時才會出現。選取此選項可在所有功能中啟用軸與 I/O 索引參數的別名索引。啟用後,您可以選擇在裝置清單中依別名順序顯示裝置(詳情請參閱「依別名順序顯示裝置」)。此選項可在 KINGSTAR 連線前或連線後啟用或停用。若在連線後變更此設定,旁邊會出現「傳送」按鈕,點選「傳送」以套用並儲存變更。 |
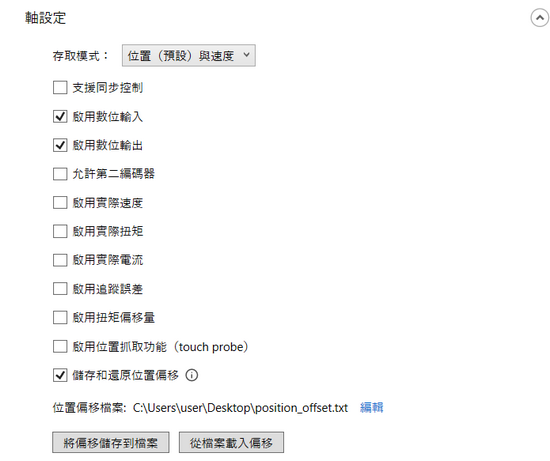
軸設定
存取模式:設定 EtherCAT 驅動器的資料傳輸模式。更多關於傳輸模式的資訊請見:概念解說 > 控制模式。
支援同步控制:啟用操作模式 (Modes of Operation) 與操作模式顯示 (Modes of Operation Display) 物件,以透過 PDO 而不是 SDO 來改變控制模式,此功能可快速變更控制模式(通常為 3 - 5 個週期),並非所有伺服驅動器都支援此功能。 啟用數位輸入:對所有軸啟用數位輸入存取,非所有軸皆有數位輸入。 啟用數位輸出:對所有軸啟用數位輸出存取,非所有軸皆有數位輸出。 允許第二編碼器:啟用軸內部位置的存取。 啟用實際速度:將實際速度變數加入 PDO。 啟用實際扭矩:將實際扭矩變數加入 PDO。 啟用實際電流:將實際電流變數加入 PDO。 啟用追蹤誤差:將跟隨誤差變數加入 PDO。 啟用扭矩偏移量:將扭矩偏移變數加入 PDO。 啟用位置抓取功能 (touch probe):將位置抓取功能控制 (TouchProbeControl) 和位置抓取功能狀態 (TouchProbeStatus) 變數加入 PDO。 儲存和還原位置偏移:勾選此選項以啟用專案中的「儲存和還原位置偏移」功能。勾選後,介面將顯示用於儲存與還原所選軸位置偏移的啟動按鈕(請參考下方啟動按鈕說明);同時啟用各軸設定,可用來指定是否將此功能套用至該軸(請參考儲存與還原)。此選項僅在啟用「儲存和還原位置偏移」功能後才會顯示(請參閱〈儲存和還原位置偏移〉中的步驟 1)。 注意:若尚未選擇「位置偏移量檔案」,在勾選此選項時,系統會顯示提示,要求您選擇或建立一個檔案。 勾選「儲存和還原位置偏移」選項後,將顯示以下啟動按鈕:
注意:若子系統偵測到位置偏移量檔案中儲存的資料與專案中儲存的資料不符,將顯示「資料衝突」提示,您可選擇其中一種方式以確保資料的一致性: 使用位置偏移量檔案中的資料取代專案中的偏移量。 使用專案中儲存的偏移量覆寫位置偏移量檔案。 |
RTX64 設定
顯示即時子系統訊息:顯示在 RtxServer 上的即時伺服器之訊息。 |
裝置設定
設定欲使用的裝置數量,若您有實際裝置可連接,可在輸入框中輸入零;若無實際裝置可連接,您可於輸入框中輸入所需裝置數量,若實際裝置數量不足於輸入裝置數量,則會建立虛擬裝置補足。 所需軸數:設定要建立於 EtherCAT 網路上的軸數量,若所需數量超過實際軸的數量,系統會建立虛擬軸以補足所需數量。 所需 IO 數:設定要建立於 EtherCAT 網路上的 I/O 模組數量,若所需數量超過實際 I/O 模組的數量,系統會建立虛擬 I/O 以補足所需數量。 選擇欲與 KINGSTAR 控制模式使用的軸KINGSTAR 控制模式所支援的軸數依您的授權而定,總數為實際軸與虛擬軸的總和,例如,若購買了支援八軸的 Axis Level 1 套裝,您可設定五個實際軸與三個虛擬軸;或四個實際軸與四個虛擬軸,此八個軸可由 KINGSTAR 控制模式控制;而此八軸之外的其他軸可受手動模式 (modeManual) 控制,您需使用自己的運動函式來控制這些軸。 當「所需軸數」中的值超過您的授權所支援的數量,設定工具將請您選擇用於KINGSTAR 控制模式的軸。以下範例為支援八軸的授權,因此最多可選擇八軸,選定軸後點擊 OK 以連接。
|





注意:連線建立後,裝置將自動顯示在裝置清單上。預設情況下,清單上顯示的裝置將按照它們在 EtherCAT 上的連接順序依序排列,裝置顯示的名稱即為該裝置的索引。欲重新排列裝置清單,您可使用別名*功能(WriteAxisAlias 或 WriteIOAlias)。
別名* 若別名功能已啟用,而裝置顯示的順序並未按照別名順序排列(仍顯示索引名稱),請執行以下步驟:
1. 至 C:\Program Files\IntervalZero\KINGSTAR\bin\ksm64Tuning 路徑下開啟 KsTuning.exe.config 檔案,將 ApplyAlias 的值改為 "true"。
2. 使用您的開發工具建立 EtherCAT 連線並為裝置設定別名。
3. 開啟 KINGSTAR 設定工具並重新連結 KINGSTAR Runtime 以更新別名順序。請確認步驟 1 中 ApplyAlias 的值已設定完成後再開啟 KINGSTAR 設定工具。
注意:設定工具不完全支援別名,以下為已知的限制:
1. 若 ApplyAlias 設為 true,則於設定工具點擊連線鍵將無法正確啟動 EtherCAT 連線。
2. 若 設定工具在 ApplyAlias 為 true 時儲存專案,則設定工具與 KINGSTAR API 無法使用別名來建立 EtherCAT 連線。
參見